-
Context and Location
-
Technology
-
Methodology

Comparing LiDAR and AI with inductive loops
LiDAR sensor technology offers a revolutionary, non-intrusive method for detecting all road users in real-time for better actuation and enhanced safety. For cities, planners, and traffic operations teams considering a transition to a more cost-effective and efficient alternative, the accuracy and reliability of the data and analytics provided by LiDAR must be thoroughly verified.
This is why Seyond set out to confirm the accuracy of its SIMPL solution using two sensors and a sophisticated perception software. This test was done to compare the accuracy of Seyond’s SIMPL solution against two existing inductive loops.
Testing took place in Lake City in Columbia County, Florida. The solution is installed at a standard intersection with three lanes in both directions.

LiDAR sensors and edge box
Two Falcon Prime LiDAR sensors running on FW4464 were installed on a cement pole at the corner of the intersection along with a POC edge box running our perception software (v1.3). This set up was specifically tailored to address the unique conditions of the location. Due to the difficulties in accessing suitable wiring to power the LiDAR sensor at another cement pole, both sensors were mounted on the same pole. This arrangement offered a comprehensive view of the intersection, although it also increased the risk of occlusion.
Comparing two technologies against manual visual count
To assess the accuracy of SIMPL, a camera installed above the lidar sensors recorded road traffic to act as a ground truth. The footage was used to review discrepancies between the inductive loop and SIMPL
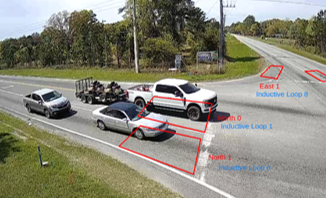
To ensure a fair comparison, Seyond's team placed the virtual loops in the exact same location as the inductive loops.
This testing was done from 2024-04-22 to 2024-04-23, involving 2 hours 50 minutes of recording analyzing two inductive loops, which is the equivalent of 5 hours 40 minutes of loop analysis.



Reliable system
From direct integrations with card networks and banks to checkout flows in the browser, we operate on and optimize at every level of the financial stack.

50+ integrations
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et.

Intelligent optimizations
Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat.

Intuitive design
Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur.
